
Rozšířená realita pomocí značek ArUco v OpenCV
V této příručce se seznámíme s tím, jak vytvořit aplikaci rozšířené reality pomocí značek ArUco a knihovny OpenCV v jazyce Python.
Head of Marketing
Obsah(13)
Úvod do rozšířené reality a značek ArUco
Rozšířená realita (AR) se stala transformativní technologií, která překlenuje propast mezi fyzickou a digitální sférou. Na rozdíl od virtuální reality (VR), která vytváří zcela pohlcující digitální prostředí, rozšiřuje rozšířená realita naše zážitky z reálného světa překrýváním virtuálního obsahu do fyzického prostředí. Toto spojení reálného a digitálního světa otevírá řadu možností v různých oblastech, od zábavy a vzdělávání až po zdravotnictví a průmyslové aplikace.
V AR jsou digitální informace, jako jsou obrázky, videa, animace a 3D modely, plynule integrovány do uživatelova pohledu na reálný svět. Tato integrace může probíhat prostřednictvím zařízení, jako jsou chytré telefony, tablety, chytré brýle, a dokonce i specializované náhlavní soupravy AR. Představte si, že můžete při cestování vidět kontextové informace o pamětihodnostech, vizualizovat si nábytek v domácnosti před jeho nákupem nebo získat pokyny krok za krokem překryté skutečným objektem při opravě.
Představení markerů ArUco a jejich významu
Jednou z klíčových výzev v oblasti rozšířené reality je přesné ukotvení digitálního obsahu v reálném světě. Zde přicházejí ke slovu markery. Markery jsou speciálně navržené vzory, které algoritmy počítačového vidění snadno detekují a rozpoznají. Slouží jako referenční body ve fyzickém prostředí a umožňují systémům AR pochopit polohu a orientaci zařízení uživatele vzhledem k těmto značkám.
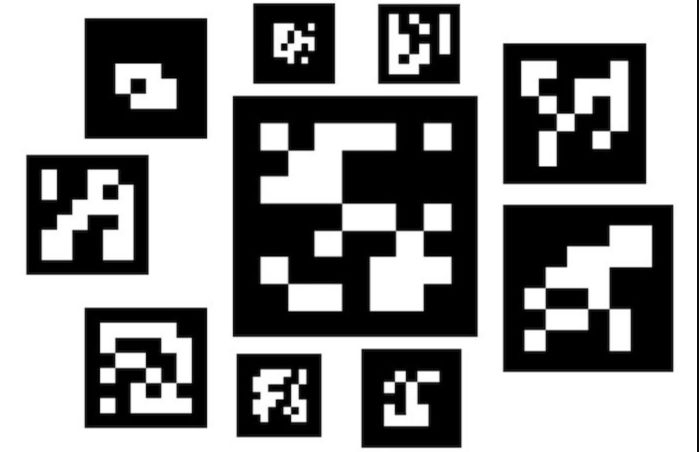
Značky ArUco, zkratka pro "Augmented Reality University of Cordoba", jsou typem čtvercových značek, které si získaly popularitu pro aplikace AR založené na značkách. Tyto markery mají několik vlastností, které je činí ideálními pro sledování:
Jednoduchost
Značky ArUco se skládají z jednoduché mřížky černých a bílých čtverců, takže je lze snadno generovat, tisknout a detekovat.
Výrazné vzory
Každá značka má ve svém uspořádání čtverců zakódován jedinečný vzor, který umožňuje spolehlivou identifikaci.
Robustní detekce
Značky ArUco jsou navrženy tak, aby byly detekovatelné i v náročných podmínkách, například při různém osvětlení a pod různými úhly.
Značky ArUco slouží jako vizuální kotvy v prostředí a umožňují systémům rozšířené reality přesně překrýt digitální obsah na fyzický svět. Když kamera nebo zařízení zachytí scénu obsahující značky ArUco, může systém AR použít techniky počítačového vidění k rozpoznání a analýze polohy a orientace značek. Tyto informace tvoří základ pro zarovnání a vykreslení virtuálního obsahu způsobem, který se plynule integruje s pohledem uživatele.
Použití OpenCV pro rozšířenou realitu
V tomto tutoriálu využijeme sílu OpenCV, všestranné a široce používané open-source knihovny počítačového vidění, k implementaci rozšířené reality pomocí značek ArUco. OpenCV poskytuje množství funkcí a nástrojů pro zpracování obrazu, detekci vzorů, kalibraci kamery a další. Kombinací schopností OpenCV a markerů ArUco můžeme vytvořit robustní zážitek z rozšířené reality, který detekuje markery, odhaduje jejich polohu a rozšiřuje realitu o virtuální obsah.
V dalších částech tohoto tutoriálu se budeme věnovat podrobnostem generování značek ArUco, kalibraci kamery, detekci značek, odhadu jejich polohy a nakonec překrytí digitálního obsahu značkami. Na konci této příručky již budete dobře rozumět tomu, jak vytvářet vlastní aplikace rozšířené reality pomocí markerů ArUco a OpenCV, což vám otevře dveře k nesčetným kreativním možnostem ve světě rozšířené reality.
Předpoklady
Než začnete, ujistěte se, že máte nainstalovány následující předpoklady:
Python (verze 3.6 nebo vyšší)
Knihovna OpenCV (pip install opencv-python ).
Knihovna Numpy (pip install numpy ).
Generování značek ArUco
Značky ArUco jsou speciální vzory, které algoritmy počítačového vidění snadno detekují a rozpoznávají. Začněme generováním sady markerů ArUco pomocí OpenCV.
python
import cv2import cv2.aruco as arucoimport numpy as np# Create a dictionary of ArUco markersaruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_250)# Create and save multiple ArUco markersfor i in range(5): marker_image = aruco.drawMarker(aruco_dict, i, 200) cv2.imwrite(f"marker_{i}.png", marker_image)
Tento kód vygeneruje pět značek ArUco a uloží je jako obrazové soubory.
Kalibrace kamery
Pro přesnou detekci značek a odhad polohy je klíčová kalibrace kamery. Pořiďte několik snímků šachovnicového obrazce z různých úhlů a použijte je ke kalibraci kamery.
python
# Capture images for camera calibration# ...# Perform camera calibration# ...# Save calibration parameters# ...
Detekce markerů a odhad polohy
Zachytíme video z kamery a detekujeme značky ArUco v reálném čase. Odhadneme polohu a orientaci (pózu) detekovaných markerů.
# Initialize camera and marker detectorcap = cv2.VideoCapture(0)parameters = aruco.DetectorParameters_create()while True: ret, frame = cap.read() # Detect ArUco markers corners, ids, _ = aruco.detectMarkers(frame, aruco_dict, parameters=parameters) if ids is not None: # Draw markers and estimate poses rvecs, tvecs, _ = aruco.estimatePoseSingleMarkers(corners, 0.05, camera_matrix, dist_coeffs) for i in range(ids.size): aruco.drawAxis(frame, camera_matrix, dist_coeffs, rvecs[i], tvecs[i], 0.1) cv2.imshow("AR using ArUco", frame) if cv2.waitKey(1) & 0xFF == ord('q'): breakcap.release()cv2.destroyAllWindows()
Tento kód zachycuje video z kamery, detekuje značky ArUco, odhaduje jejich polohu a vizualizuje zážitek z rozšířené reality vykreslením souřadnicových os na značkách.
Rozšíření reality
Nyní rozšíříme realitu překrytím virtuálního obsahu na detekované značky ArUco.
# Load virtual content (image or 3D model)content = cv2.imread("virtual_content.png") # Load your content herewhile True: ret, frame = cap.read() # Detect ArUco markers corners, ids, _ = aruco.detectMarkers(frame, aruco_dict, parameters=parameters) if ids is not None: for i in range(ids.size): # Estimate marker pose rvec, tvec = aruco.estimatePoseSingleMarkers(corners[i], 0.05, camera_matrix, dist_coeffs) # Project virtual content onto the marker # ... # Draw markers aruco.drawDetectedMarkers(frame, corners, ids) cv2.imshow("AR using ArUco", frame) if cv2.waitKey(1) & 0xFF == ord('q'): breakcap.release()cv2.destroyAllWindows()
V této části načtete vlastní virtuální obsah (obrázek nebo 3D model) a promítnete jej na značky na základě jejich odhadovaných poloh.
Gratulujeme!
Naučili jste se vytvořit aplikaci rozšířené reality pomocí markerů ArUco a OpenCV. Tento průvodce se zabýval generováním markerů, kalibrací kamery, detekcí markerů, odhadem pózy a rozšířením reality o virtuální obsah. Neváhejte dále zkoumat, přidávat interaktivitu nebo experimentovat s pokročilejšími funkcemi.
Nezapomeňte, že rozšířená realita nabízí nekonečné možnosti kreativních aplikací a tento průvodce slouží jako pevný základ pro vytváření vlastních zážitků s rozšířenou realitou.
Reference
Dokumentace OpenCV: https://docs.opencv.org/4.x/index.html
Dokumentace ArUco: https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html
Nebojte se rozšířit jednotlivé části a upravit kód podle svých potřeb. Tento komplexní průvodce by měl čtenářům poskytnout hluboké pochopení toho, jak implementovat rozšířenou realitu pomocí značek ArUco a OpenCV.
Technologies
New Articles
New blog posts you may be interested in
Sladění financí a operativy: Co se skutečně zlepšilo
Když finance a operativa pracují odděleně, firma zpravidla platí dvakrát. Jednou časem, podruhé chybami. Tento case popisuje, co se zlepšilo po narovnání procesu mezi dispečinkem, doklady a fakturací.
Číst dále
Co se změnilo po zavedení řízení životního cyklu rezervací
Tento case ukazuje praktickou změnu po přechodu z nejasného tlačení objemu na řízený životní cyklus rezervací. Cílem nebylo přidat další dashboard. Cílem bylo změnit, jak firma rozhoduje o práci v čase.
Číst dále
Compliance v dispečinku: Pravidla pro certifikačně bezpečné přiřazování
Compliance v logistice není jen kontrola dokumentů. Je to každodenní rozhodování, jestli konkrétní vozidlo a souprava může vézt konkrétní materiál po konkrétní trase. Když je to jen v hlavě dispečera, riziko roste s objemem provozu.
Číst dáleRead also
Recommended reads for You

Jak firmy ztrácí kontrolu: příliš nástrojů, příliš excelů, příliš verzí pravdy
Mnoho firem si digitalizaci nepokazí tím, že by nic nedělaly. Naopak. Postupně nakoupí řadu nástrojů, z nichž každý řeší malou část jejich fungování. Jenže časem zjistí, že místo jednoho funkčního systému mají roztříštěné procesy, nedůvěryhodná data a lidi, kteří si pro jistotu vedou vlastní excelové tabulky bokem.
Číst dále
Postavte si správný hotelový software a AI CRM systém, který vám bude vyhovovat
Užitečné postřehy od naší projektové manažerky Hsinyu Ko pro hotely, které chtějí lepší software, jenž skutečně odpovídá jejich způsobu práce. Vycházejí z našich zkušeností se softwarovými projekty.
Číst dále
Proč je konverzační AI budoucností hlasové podpory
Většina „AI“ chatbotů v call centrech pouze následuje předem daný scénář. Když zákazník položí nečekanou otázku, systém často selže. V Moravio však vyvíjíme chytré hlasové asistenty, kteří skutečně rozumí lidem, zvládnou i složité dotazy a odpovídají přirozeně – jako člověk. Tím pomáháme firmám šetřit čas, peníze i reputaci při vyřizování rutinních hovorů. Zákazníci získají rychlou a přirozenou podporu kdykoli, zatímco týmy se mohou soustředit na důležitější úkoly.
Číst dále
Jakub Bílý
Vedoucí obchodního rozvoje