
Augmented Reality mit ArUco-Marker in OpenCV
In diesem Handbuch werden wir untersuchen, wie Sie eine AR-Anwendung mithilfe von AruCo-Markern und der OpenCV-Bibliothek in Python erstellen.
Leiter Marketing
Inhalt(13)
- Einführung in Augmented Reality und AruCo Markers
- Vorstellung von AruCo Markern und ihrer Bedeutung
- Schlichtheit
- Unverwechselbare Muster
- Robuste Erkennung
- OpenCV für Augmented Reality verwenden
- Voraussetzungen
- Generieren von Aruco-Markern
- Kamerakalibrierung
- Markererkennung und Posenschätzung
- Augmentieren der Realität
- Herzlichen Glückwunsch!
- Referenzen
Einführung in Augmented Reality und AruCo Markers
Augmented Reality (AR) hat sich zu einer transformativen Technologie entwickelt, die die Lücke zwischen dem physischen und dem digitalen Bereich überbrückt. Im Gegensatz zu Virtual Reality (VR), die vollständig immersive digitale Umgebungen schafft, verbessert AR unsere Erfahrungen in der realen Welt, indem virtuelle Inhalte auf die physische Umgebung übertragen werden. Diese Verschmelzung von realer und digitaler Welt eröffnet eine Vielzahl von Möglichkeiten in verschiedenen Bereichen, von Unterhaltung und Bildung bis hin zu Anwendungen im Gesundheitswesen und in der Industrie.
In AR werden digitale Informationen wie Bilder, Videos, Animationen und 3D-Modelle nahtlos in die Sicht des Benutzers auf die reale Welt integriert. Diese Integration kann über Geräte wie Smartphones, Tablets, Datenbrillen und sogar spezielle AR-Headsets erfolgen. Stellen Sie sich vor, Sie könnten unterwegs Kontextinformationen zu Sehenswürdigkeiten sehen, sich Möbel in Ihrem Zuhause vor dem Kauf vorstellen oder während einer Reparatur schrittweise Anleitungen erhalten, die einem realen Objekt überlagert werden.
Vorstellung von AruCo Markern und ihrer Bedeutung
Eine der wichtigsten Herausforderungen bei AR ist die präzise Verankerung digitaler Inhalte in der realen Welt. Hier kommen Marker ins Spiel. Marker sind speziell entworfene Muster, die von Computer-Vision-Algorithmen leicht erkannt und erkannt werden können. Sie dienen als Referenzpunkte in der physischen Umgebung und ermöglichen es AR-Systemen, die Position und Ausrichtung des Geräts des Benutzers im Verhältnis zu diesen Markierungen zu verstehen.
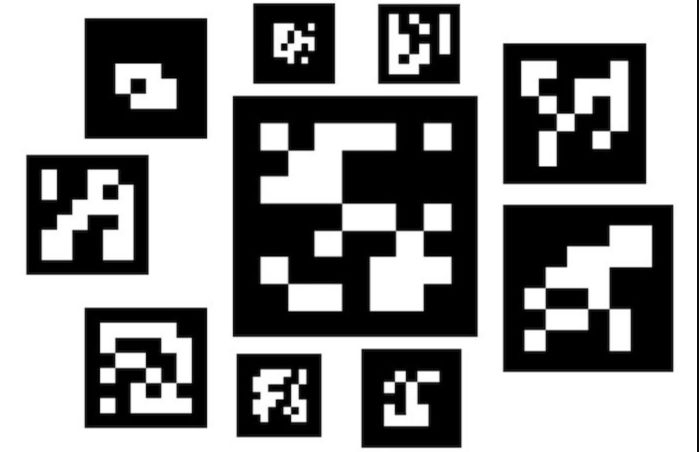
ARuCo-Marker, kurz für „Augmented Reality University of Cordoba“, sind eine Art quadratischer Marker, der für markerbasierte AR-Anwendungen immer beliebter wird. Diese Marker besitzen mehrere Eigenschaften, die sie ideal für das Tracking machen:
Schlichtheit
AruCo-Marker bestehen aus einem einfachen Raster aus schwarzen und weißen Quadraten, sodass sie leicht generiert, gedruckt und erkannt werden können.
Unverwechselbare Muster
Jeder Marker hat ein einzigartiges Muster, das in seiner Anordnung der Quadrate kodiert ist und eine zuverlässige Identifizierung ermöglicht.
Robuste Erkennung
AruCo-Marker sind so konzipiert, dass sie auch unter schwierigen Bedingungen, wie z. B. unterschiedlichen Lichtverhältnissen und Winkeln, erkennbar sind.
ARuCo-Marker dienen als visuelle Anker in der Umgebung und ermöglichen es AR-Systemen, digitale Inhalte präzise mit der physischen Welt zu überlagern. Wenn eine Kamera oder ein Gerät eine Szene mit ARuCo-Markern aufnimmt, kann das AR-System Computer-Vision-Techniken verwenden, um die Positionen und Ausrichtungen der Marker zu erkennen und zu analysieren. Diese Informationen bilden die Grundlage für die Ausrichtung und das Rendern virtueller Inhalte auf eine Weise, die sich nahtlos in die Sicht des Benutzers einfügt.
OpenCV für Augmented Reality verwenden
In diesem Tutorial werden wir die Leistungsfähigkeit von OpenCV, einer vielseitigen und weit verbreiteten Open-Source-Bibliothek für Computer Vision, nutzen, um Augmented Reality mithilfe von AruCo-Markern zu implementieren. OpenCV bietet eine Fülle von Funktionen und Tools für Bildverarbeitung, Mustererkennung, Kamerakalibrierung und mehr. Durch die Kombination der Funktionen von OpenCV mit AruCo-Markern können wir ein robustes AR-Erlebnis schaffen, das Marker erkennt, ihre Posen schätzt und die Realität mit virtuellen Inhalten erweitert.
In den folgenden Abschnitten dieses Tutorials werden wir uns mit den Details der Generierung von ARuCo-Markern, der Kalibrierung der Kamera, der Erkennung von Markern, der Schätzung ihrer Posen und schließlich dem Überlagern digitaler Inhalte auf die Marker befassen. Am Ende dieses Leitfadens werden Sie ein solides Verständnis dafür haben, wie Sie Ihre eigenen Augmented-Reality-Anwendungen mithilfe von AruCo-Markern und OpenCV erstellen können, was Ihnen die Tür zu unzähligen kreativen Möglichkeiten in der AR-Welt öffnet.
Voraussetzungen
Bevor Sie beginnen, stellen Sie sicher, dass die folgenden Voraussetzungen installiert sind:
Python (3.6 oder höher)
OpenCV-Bibliothek (pip installiere opencv-Python )
Numpy-Bibliothek (pip install numpy )
Generieren von Aruco-Markern
AruCo-Marker sind spezielle Muster, die von Computer-Vision-Algorithmen leicht erkannt und erkannt werden können. Beginnen wir mit der Generierung einer Reihe von AruCo-Markern mithilfe von OpenCV.
Python
importiere cv2import cv2.aruco als arucoimport numpy als np# Erstelle ein Wörterbuch von Aruco-Markern aruco_dict = aruco.dictionary_get (aruco.dict_6x6_250) # Erstelle und speichere mehrere Aruco-Marker für i in range (5): marker_image = aruco.drawMarker (aruco_dict, i, 200) cv2.imwrite (fmarker_ {i} .png“, marker_bild)
Dieser Code generiert fünf AruCo-Marker und speichert sie als Bilddateien.
Kamerakalibrierung
Für eine genaue Markererkennung und Posenschätzung ist die Kamerakalibrierung von entscheidender Bedeutung. Nehmen Sie mehrere Bilder eines Schachbrettmusters aus verschiedenen Blickwinkeln auf und verwenden Sie sie, um die Kamera zu kalibrieren.
Python
# Bilder für die Kamerakalibrierung aufnehmen#... # Kamerakalibrierung durchführen#... # Kalibrierungsparameter speichern#...
Markererkennung und Posenschätzung
Lassen Sie uns Videos von der Kamera aufnehmen und AruCo-Marker in Echtzeit erkennen. Wir schätzen die Position und Ausrichtung (Pose) der erkannten Marker ab.
# Kamera und Marker initialisieren detectorcap = cv2.videoCapture (0) parameters = aruco.DetectorParameters_create () while True: ret, frame = cap.read () # Erkennt die Ecken und IDs der Aruco-Marker, _ = aruco.detectMarkers (frame, aruco_dict, parameters=parameters) wenn ids nicht None ist: # Marker zeichnen und Posen schätzen rvecs, tvecs s, _ = aruco.estimatePoseSingleMarkers (corners, 0.05, camera_matrix, dist_coeffs) für i im Bereich (ids.size): aruco.drawAxis (frame, camera_matrix, dist_coeffs, rvecs [i], tvecs [i], 0.1) cv2.imshow („AR mit AruCo“, frame) if cv2.waitKey (1) & 0xFF == ord ('q'): breakcap.release () cv2.destroyAllWindows ()
Dieser Code erfasst das Video von der Kamera, erkennt ARuCo-Marker, schätzt ihre Posen und visualisiert das AR-Erlebnis, indem er Koordinatenachsen über den Markierungen zeichnet.
Augmentieren der Realität
Lassen Sie uns nun die Realität erweitern, indem wir den erkannten ARuCO-Markern virtuelle Inhalte überlagern.
# Laden Sie virtuelle Inhalte (Bild oder 3D-Modell) content = cv2.imread (“ virtual_content.png „) # Laden Sie Ihre Inhalte währenddessen hoch True: ret, frame = cap.read () # Erkenne die Ecken und IDs der Aruco-Marker, _ = aruco.detectMarkers (frame, aruco_dict, parameters=parameters), falls ids nicht None ist: for i in range (ids.size): # Schätzen Sie die Markerpose rvec, tvec vec = aruco.estimatePoseSingleMarkers (corners [i], 0.05, camera_matrix, dist_coeffs) # Projiziere virtuelle Inhalte auf den Marker #... # Zeichne Markierungen aruco.drawDetectedMarkers (frame, corners, ids) cv2.imshow („AR using aRUCO“, frame) if cv2.waitKey ( 1) & 0xFF == ord ('q'): breakcap.release () cv2.destroyAllWindows ()
In diesem Abschnitt würden Sie Ihre eigenen virtuellen Inhalte (Bild oder 3D-Modell) laden und sie auf der Grundlage ihrer geschätzten Posen auf die Marker projizieren.
Herzlichen Glückwunsch!
Sie haben gelernt, eine Augmented Reality-Anwendung mit AruCo-Markern und OpenCV zu erstellen. In diesem Handbuch wurden das Generieren von Markern, die Kamerakalibrierung, die Markererkennung, die Posenschätzung und die Erweiterung der Realität mit virtuellen Inhalten behandelt. Du kannst gerne weiter forschen, Interaktivität hinzufügen oder mit fortgeschritteneren Funktionen experimentieren.
Denken Sie daran, dass Augmented Reality endlose Möglichkeiten für kreative Anwendungen bietet. Dieser Leitfaden dient als solide Grundlage für die Erstellung Ihrer eigenen AR-Erlebnisse.
Referenzen
OpenCV-Dokumentation: https://docs.opencv.org/4.x/index.html
AruCo Dokumentation: https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html
Fühlen Sie sich frei, jeden Abschnitt zu erweitern und den Code an Ihre Bedürfnisse anzupassen. Dieser umfassende Leitfaden soll den Lesern ein tiefes Verständnis dafür vermitteln, wie Augmented Reality mithilfe von AruCo-Markern und OpenCV implementiert werden kann.
Technologies
New Articles
New blog posts you may be interested in
Finance + Operations Alignment: What Actually Improved
When finance and operations run in separate realities, companies usually pay twice, first in time, then in errors. This case explains what improved after aligning dispatch, document flow, and invoicing readiness.
Weiterlesen
What Changed After Moving to Reservation Lifecycle Control
This case outlines practical change after moving from volume-push behavior to controlled reservation lifecycle management. The goal was not another dashboard. The goal was to change operational decision quality over time.
Weiterlesen
Compliance in Dispatch: Rules for Certification-Safe Assignment
Compliance in logistics is not only document control. It is daily assignment logic, whether specific equipment can carry specific material on a specific route. If this knowledge lives only in dispatcher memory, risk scales with volume.
WeiterlesenRead also
Recommended reads for You

How companies lose control: too many tools, too many Excels, too many versions of the truth
Viele Unternehmen scheitern bei ihrer Digitalisierung nicht, weil sie nichts tun. Ganz im Gegenteil. Sie kaufen nach und nach eine Reihe von Tools, von denen jedes einen kleinen Teil ihres Betriebs löst. Doch mit der Zeit stellen sie fest, dass sie statt eines funktionierenden Systems fragmentierte Prozesse, unzuverlässige Daten und Mitarbeiter haben, die sicherheitshalber ihre eigenen Excel-Tabellen führen.
Weiterlesen
Die richtige Hotelsoftware und ein KI-gestütztes CRM-System, das wirklich zu Ihnen passt
Hilfreiche Einblicke von unserer Projektmanagerin Hsinyu Ko für Hotels, die bessere Software suchen – Software, die wirklich zu ihren Arbeitsabläufen passt. Basierend auf unseren Erfahrungen aus zahlreichen Softwareprojekten.
Weiterlesen
Warum konversationelle KI die Zukunft des Sprachsupports ist
Die meisten „KI“ -Callcenter-Bots folgen einfach einem Skript. Sie scheitern, wenn jemand etwas Unerwartetes fragt. Bei Moravio entwickeln wir intelligente Sprachassistenten, die Menschen wirklich verstehen, auch komplexe Fragen, und auf natürliche Weise wie ein Mensch antworten. Dies hilft Unternehmen, kein Geld mehr zu verlieren und Routineanrufen zu vertrauen. Kunden erhalten jederzeit schnellen, natürlichen Support, und die Teams können sich auf größere Probleme konzentrieren.
Weiterlesen
Jakub Bílý
Leiter Geschäftsentwicklung